
Creados originalmente para su uso en la industria petrolera y en defensa, los vehículos operados remotamente (conocidos por sus siglas en inglés: ROV – Remote Operated Vehicle) son robots submarinos no tripulados y manejados por un operador humano desde la superficie.
Suponen una herramienta científica de gran valor para la exploración de fondos marinos ya que, por sus características, han hecho posible explorar grandes profundidades (incluso lejos de la costa), inalcanzables o de riesgo para los buceadores, evitando su complejidad y a un coste asequible en comparación a lo que supone desplegar un vehículo submarino operado mediante tripulación en su interior.
También, y no menos importante, permiten la investigación y la obtención de muestras de forma no invasiva en áreas sensibles, hábitats esenciales y zonas marinas protegidas, respetando criterios fundamentales de conservación.

¿Cómo funciona un ROV?
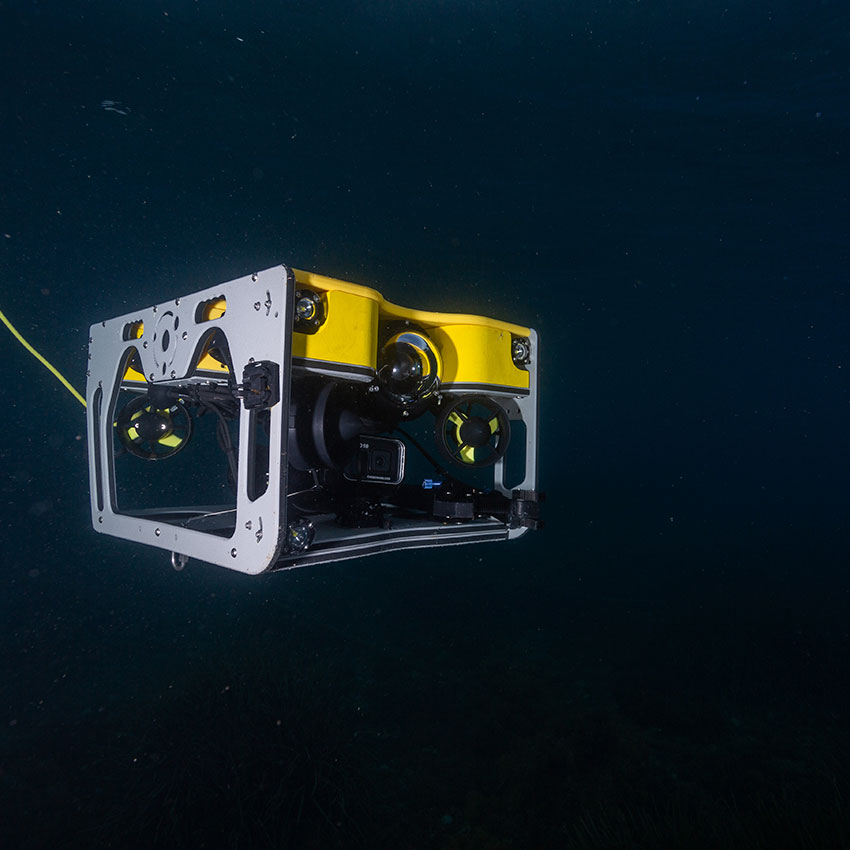
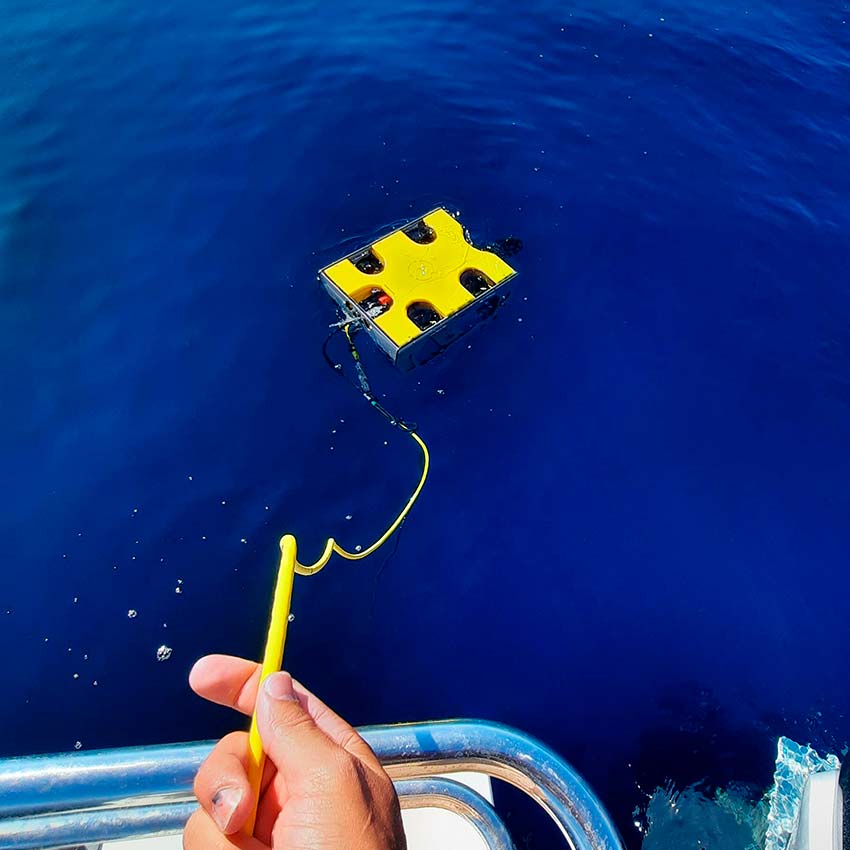
El ROV se encuentra conectado a un ordenador (que normalmente se ubica en un barco) a través de un cable aislado y protegido que contiene dentro conductores de cobre para la alimentación y la señal audiovisual. Este cable es llamado “Umbilical” o “Tether”.
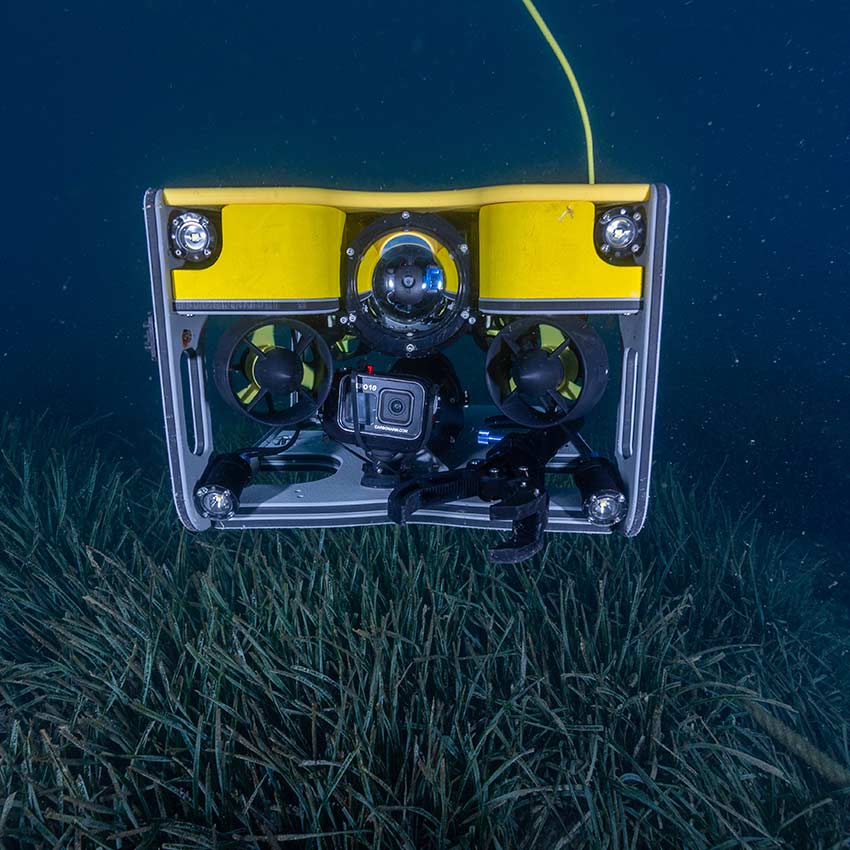
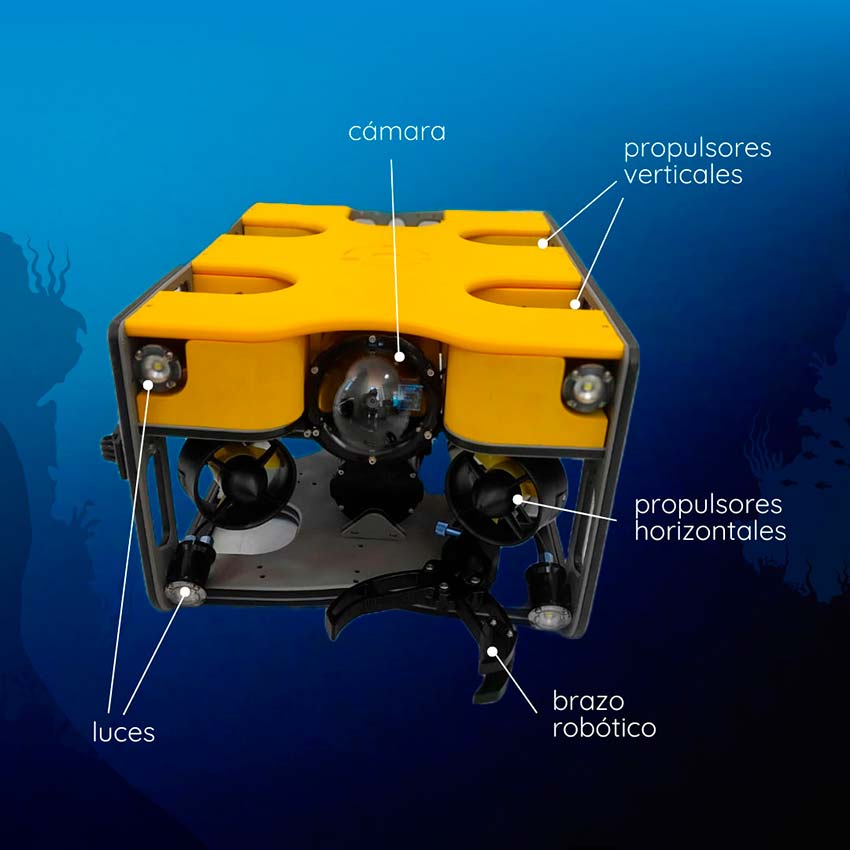
Cuando se sumerge gana profundidad activando sus propulsores verticales. Los horizontales, claro está, los utiliza para desplazarse hacia los laterales.
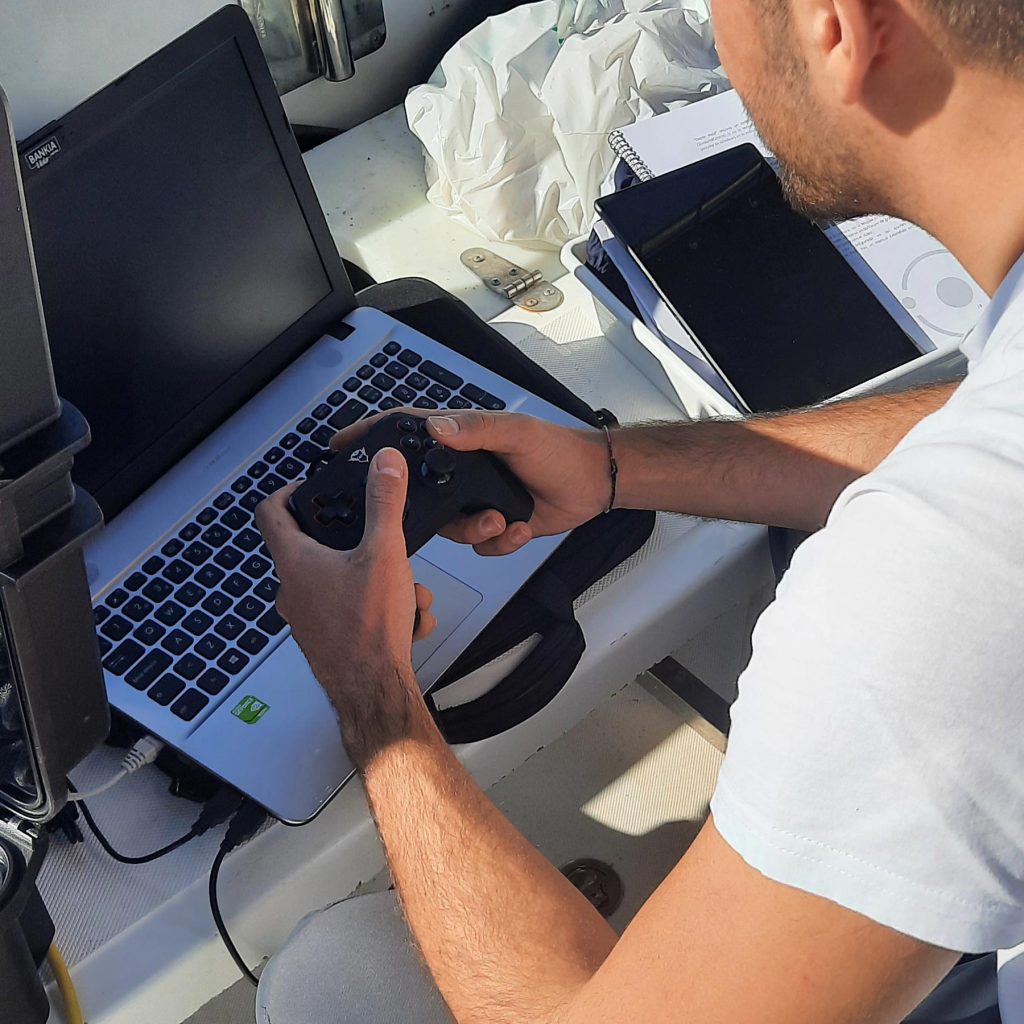
El técnico operador que lo maneja desde la superficie utiliza un mando a distancia (similar a los de las consolas de videojuegos) y unas gafas FPV, que permiten ver en primera persona (de ahí sus siglas en inglés, First Person View) lo que está observando el ROV en vivo y en directo.
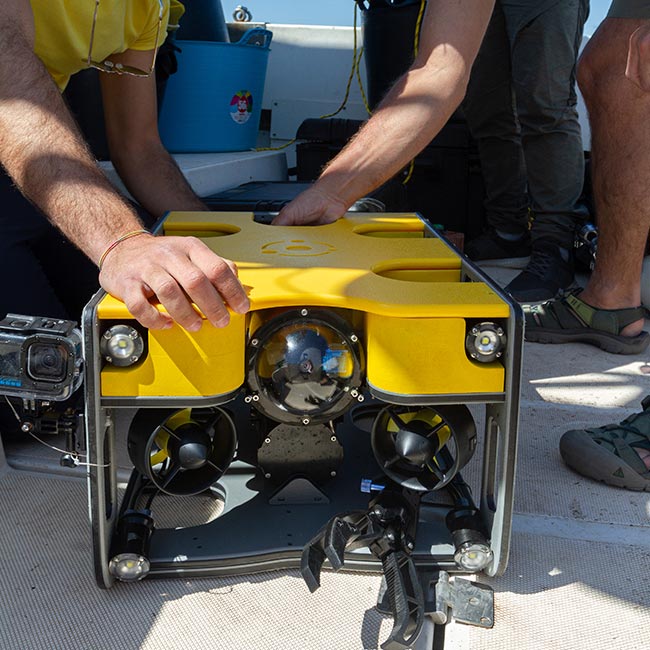
Las luces regulables que lleva incorporadas mejoran la visibilidad y permiten ver el entorno incluso cuando la luz natural no alcanza los fondos profundos que se están estudiando. Estas 4 luces, que pueden llegar a alcanzar 1500 lúmenes cada una de ellas, ayudan a corregir su rumbo, acercarse con cuidado hacia el objetivo y coger muestras que los investigadores consideren de interés científico y que más tarde serán estudiadas. Para la recolección de estas muestras, el ROV dispone de un brazo robótico con pinza extensible que permite la extracción selectiva de especies singulares.
Las fotos y vídeos que se registran desde su lente también se pueden almacenar y analizar posteriormente.

¿Por qué un cable largo?
La transmisión de ondas de radio a través del agua es compleja.
Para poder transmitir de forma efectiva dentro del agua del mar, la longitud de las ondas debe ser mucho mayor que la necesaria cuando la transmisión se hace por aire. Esto dificulta su uso, ya que para conseguirlo es necesario utilizar grandes antenas (incluso de cientos de metros) que son imposibles de instalar en embarcaciones de observación. Por ende, lo más práctico para una trasmisión eficaz de la imagen del ROV es el umbilical.
Datos sobre nuestro ROV:
Medidas: 0,28 m x 0,34 m x 0,52 m
Peso: 12.45 Kg
Cámara: 1080p
Velocidad máxima: 3 nudos
Profundidad máxima: 300 metros
Nuestro ROV: Un robot que llega más lejos
La profundidad máxima alcanzada por la mayoría de buceadores es de 30-40 metros. Debido al incremento de la presión que supone descender en el mar (una atmosfera por cada 10 metros de profundidad) y el consecuente aumento de la toxicidad de los gases, sumergirse a mayor profundidad conlleva grandes riesgos y complicaciones. Tantos, que pocas personas con una gran formación se sumergen más allá de los 40 metros.
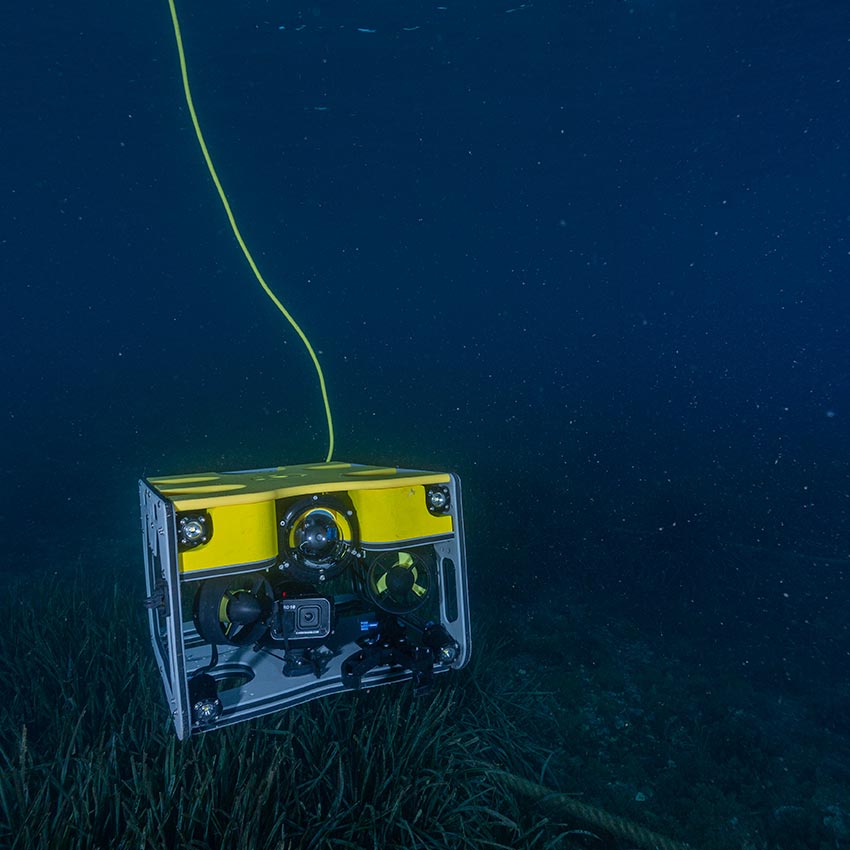
Con la incorporación del ROV dentro del equipo, esta limitación se supera y podemos llegar con él hasta los 150 metros, extendiendo el área de investigación y la variedad de hábitats a estudiar.
El ROV es una ventana directa a las profundidades poco exploradas, una posibilidad para redescubrir zonas escasamente estudiadas y ampliar el conocimiento sobre ellas.
Es por ello que esta inclusión tecnológica transforma las posibilidades y el alcance de nuestros estudios científicos en los fondos marinos, de una forma respetuosa, para -entre otras cosas- afrontar los desafíos que la conservación marina presenta hoy en día.
Conocer más nos permite tomar mejores decisiones.